DeltaBot
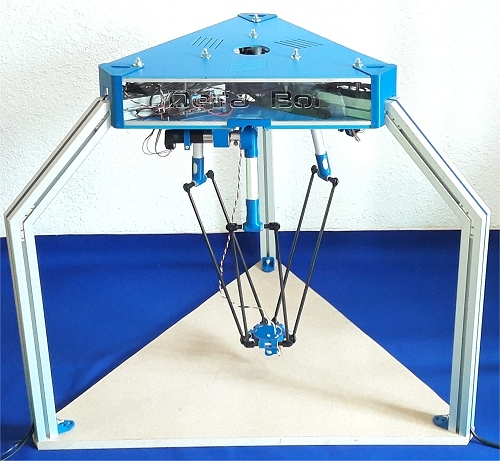
Le DeltaBot est un robot delta 3 axes hautes performances, compatible Arduino, permettant de faire de multiples activités.
Un robot delta 3 axes permet de positionner l'effecteur dans un espace à 3 dimensions avec une orientation constante. Ceci en fait un robot idéal dans différents domaines, comme:
- dans le milieu médical, pour ses capacités de positionnement chirurgical
- dans le monde industriel pour réaliser, par exemple, des opérations de "Pick and Place" à grande vitesse
Ce robot présente un grand intérêt pédagogique, tant du point de vue de son architecture mécanique que de sa commande et des asservissements associés.
Par ailleurs, il a l'avantage d'être totalement ouvert:
- Le modèle CAO (SolidWorks) est fourni pour permettre aux élèves d'étudier en détail les différents composants et leurs liaisons mécaniques
-
Tous les logiciels sont fournis en code source et peuvent être modifiés pour étendre les capacités du robot:
- programmes Arduino de commande de chaque axe
- programmes Python de commande globale de robot
- Les interfaces graphiques de pilotage sont modifiables sans aucune programmation
Vidéos
Mouvements programmés
La vidéo ci-dessous montre le résultat de mouvements programmés sur le DeltaBot (cercles lents et rapides, pick & place rapide). Elle permet d'apprécier la très grande dynamique du robot.
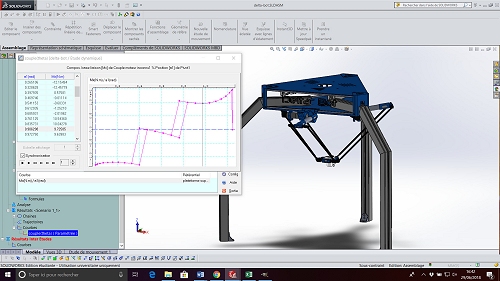
Animation SolidWorks / Meca3D
L'animation ci-dessous a été réalisée sur la base du modèle SolidWorks inclus dans la fourniture logicielle du robot.
Composants du systèmes
Mécanique
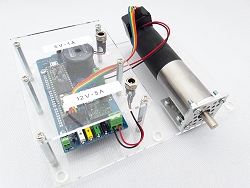
Le DeltaBot a été conçu pour reproduire le plus fidèlement possible la vitesse d'un robot industriel grâce à l'utilisation de moteurs Faulhaber hautes performances:
- Serie 3257: 12 V, 5 A, arbre monté sur roulement à billes, constante de temps mécanique de 4.7 ms
- Réducteur 43:1
- Codeur incrémental HEDS 5500 A: 500 lignes par tour de l'arbre moteur, soit 2000 fronts sur les signaux en quadrature, ce qui donne 86000 évènements comptés par tour de l'arbre de sortie du réducteur. Ceci permet une résolution de mesure angulaire de 0.0042 degrés
La structure mécanique très légère et très rigide (bras supérieurs en aluminium et bielettes inférieures en fibre de carbone) supporte aisément les fortes accélérations développées par ces moteurs.
Electronique de commande
Le système de commande de chaque axe est composé d'une carte Teensy 3.6 (compatible Arduino) permettant d'exécuter à la fois une boucle de courant (mesuré par un capteur à effet Hall) à haute fréquence d'échantillonnage et les asservissements de vitesse et de position, avec décodage matériel des signaux issus du codeur incrémental.
La gestion globale des trois cartes Teensy 3.6 est assurée par l'ordinateur hôte sur lequel se connecte le robot.
Pilotage
 Le robot peut se piloter interactivement ou par programme depuis l'ordinateur hôte. Il est également possible de le commander grâce à au gamepad filaire fourni.
Le robot peut se piloter interactivement ou par programme depuis l'ordinateur hôte. Il est également possible de le commander grâce à au gamepad filaire fourni.
Equipements de l'effecteur
Deux équipements différents sont livrés pour être montés alternativement sur l'extrémité du robot:
- un électro-aimant (pour réaliser des opérations de "pick & place" sur des pièces magnétiques)
- une Webcam (pour l'utilisation du robot en mode chirurgical avec traitement d'image)
Activités réalisables avec le système
Ce système permet de réaliser de nombreuses activités, dont certaines sont détaillées par la suite.
Analyse des systèmes
Différents types de diagrammes SysML peuvent être étudiés, ainsi que la chaine d'énergie et d'information. Le graphe d'état décrivant la procédure de prise d'origine est également une activité très intéressante à réaliser avec les élèves.



Etudes mécaniques
Un modèle CAO mécanique détaillé est livré avec le DeltaBot. Vous pouvez également le télécharger ici:
https://www.3sigma.fr/deltabot/SW/DeltaBot_SW.zip
Il permet d'aborder de nombreuses notions:
- Modélisation des liaisons
- Liaisons équivalentes
- Mobilité, hyperstatisme
- Recherche de positions particulières, singulières
Il permet également de simuler la cinématique du système avant de passer sur le robot réel.
Il est aussi possible d'étudier la modélisation cinématique directe et inverse, dont les programmes de calcul en Python sont fournis.
Asservissements
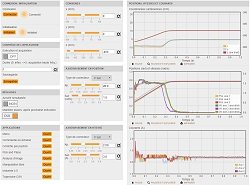 Les réglages des régulateurs PID de position et de vitesse ainsi que les saturations internes de vitesse et de courant sont modifiables facilement afin de comparer leur influence respective sur la réponse du système.
Les réglages des régulateurs PID de position et de vitesse ainsi que les saturations internes de vitesse et de courant sont modifiables facilement afin de comparer leur influence respective sur la réponse du système.
Il est ainsi possible de comparer différents réglages sur des essais de type statique ou dynamique, en chargeant l'effecteur avec les masses fournies.
Par ailleurs, l'affichage du courant mesuré sur les tracés des mesures acquises permet de vérifier que le couple nécessaire au maintient d'une charge correspond à celui qui peut être calculé à partir des données géométriques du robot.
Intelligence artificielle
Le DeltaBot est très adapté pour réaliser différents types de tâche en IA, simples ou plus complexes:
- Apprentissage du modèle géométrique inverse par réseaux de neurones
- Commande vocale (un microphone est fourni)
- Utilisation de la caméra pour faire de la reconnaissance de couleur, de forme ou d'objets
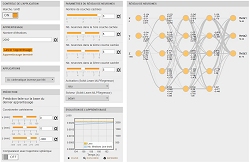
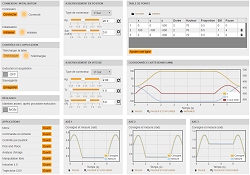
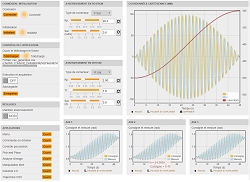
La capture d'écran ci-dessous montre le tableau de bord d'apprentissage du modèle inverse par réseau de neurones, permettant de régler le nombre de couche, le nombre de neurones par couche, le type de solveur, de fonction d'activation, etc...:
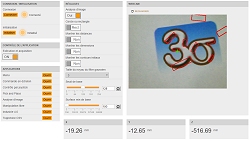
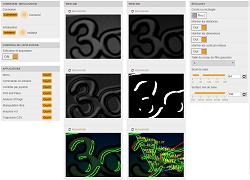
Pilotage en mode chirurgical avec analyse et traitement d'images
Le gamepad permet de piloter le robot à très faible vitesse afin de simuler un mode chirurgical, associé à l'utilisation de la Webcam. Des opérations de traitement d'image peuvent être réalisées en parallèle.
Programmation en mode "Pick & Place"
 Cette application phare des robots delta est mise en œuvre via la définition de fichiers CSV décrivant les différents points à rejoindre. Les réglages du robot sont modifiables afin d'atteindre des vitesses très spectaculaires.
Cette application phare des robots delta est mise en œuvre via la définition de fichiers CSV décrivant les différents points à rejoindre. Les réglages du robot sont modifiables afin d'atteindre des vitesses très spectaculaires.
La théorie sous-jacente permettant d'obtenir des trajectoires sous une forme polynomiale est détaillée et peut être étudée.
Les asservissements étant modifiables, il est possible de comparer les performances du suivi de consigne avec différents types de réglages.
Mode "Industrie 4.0"
 Dans ce mode, le robot est programmé par apprentissage, c'est-à-dire via l'enregistrement d'une trajectoire obtenue par la mise en mouvement manuelle de l'effecteur. Ceci se fait de plus en plus dans l'industrie, d'où le nom de ce mode.
Dans ce mode, le robot est programmé par apprentissage, c'est-à-dire via l'enregistrement d'une trajectoire obtenue par la mise en mouvement manuelle de l'effecteur. Ceci se fait de plus en plus dans l'industrie, d'où le nom de ce mode.
Le fichier de points peut ensuite être rejoué avec différents types de réglage des correcteurs.
Mode "Trajectoire via fichier CSV"
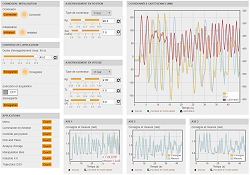
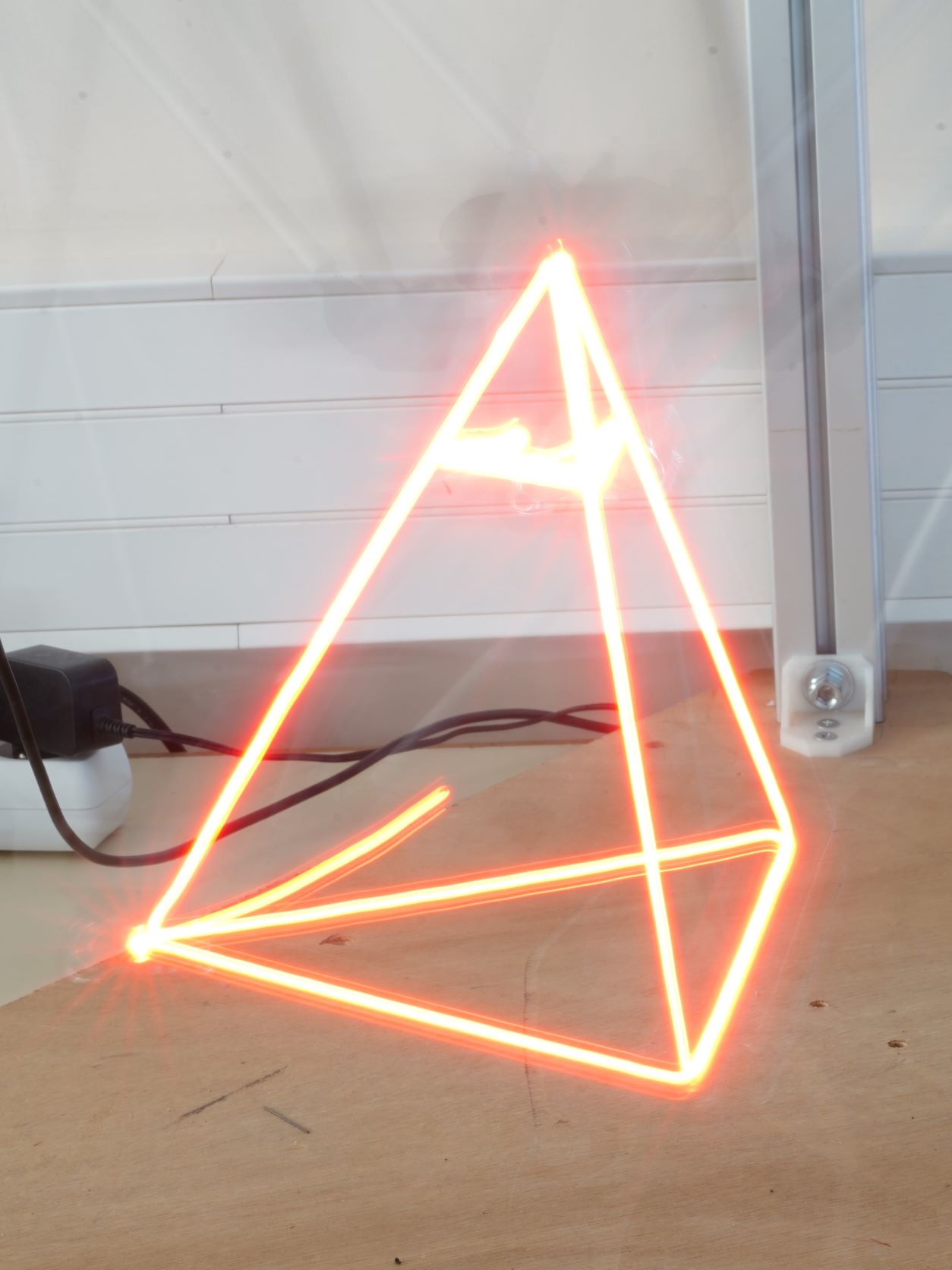
Une autre façon de programmer le robot consiste à envoyer un fichier de points contenant les coordonnées cartésiennes à suivre en fonction du temps. Cela permet, par exemple, de créer des trajectoires complexes sur la base d’équations.
Le fichier de points peut ensuite être rejoué avec différents types de réglage des correcteurs.
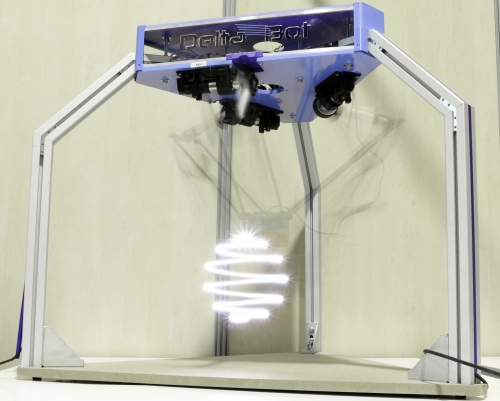
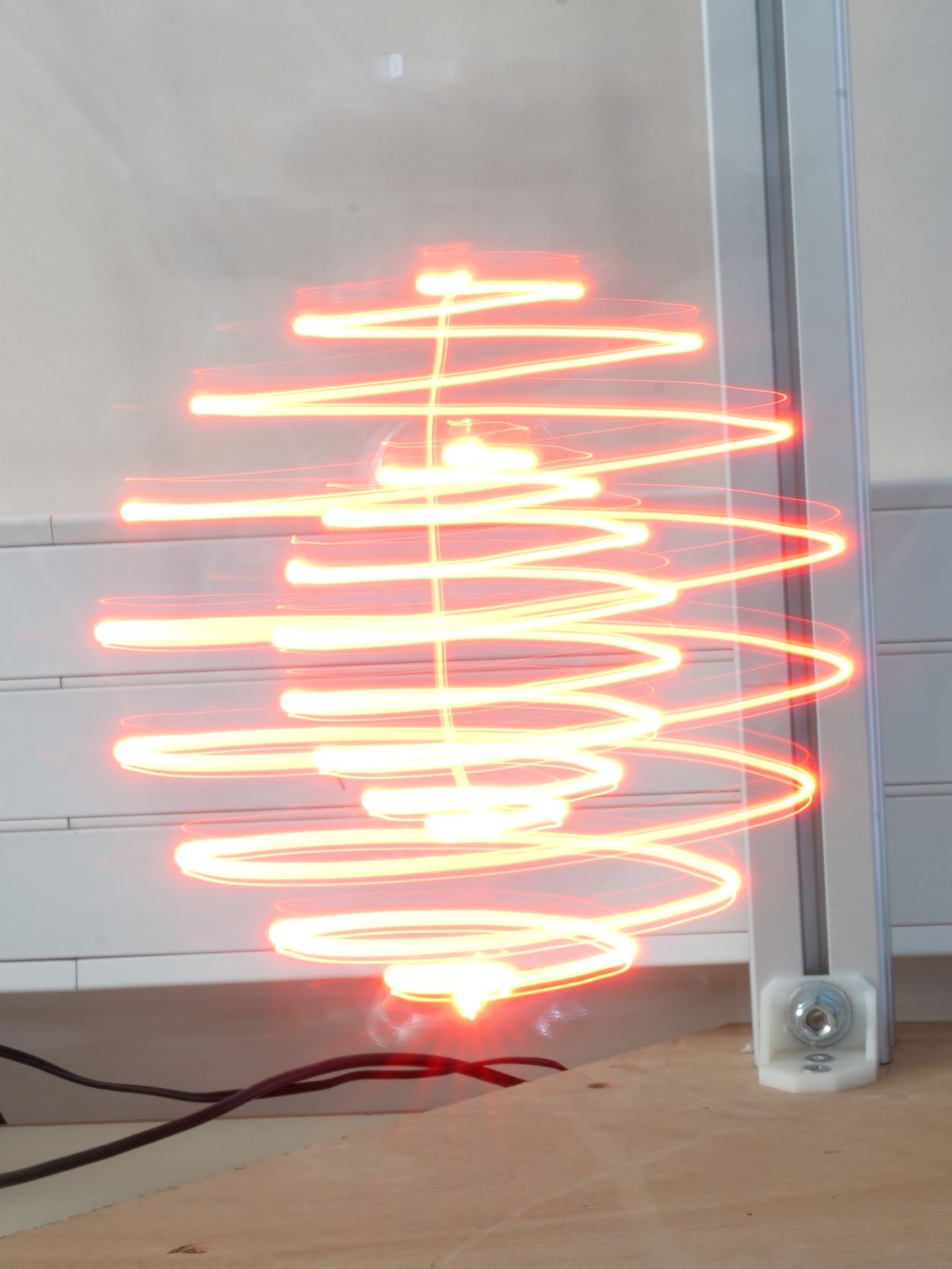
La trajectoire correspondant à la capture d'écran ci-dessus est une sphère, comme le montre la photo à long temps de pose ci-dessous:
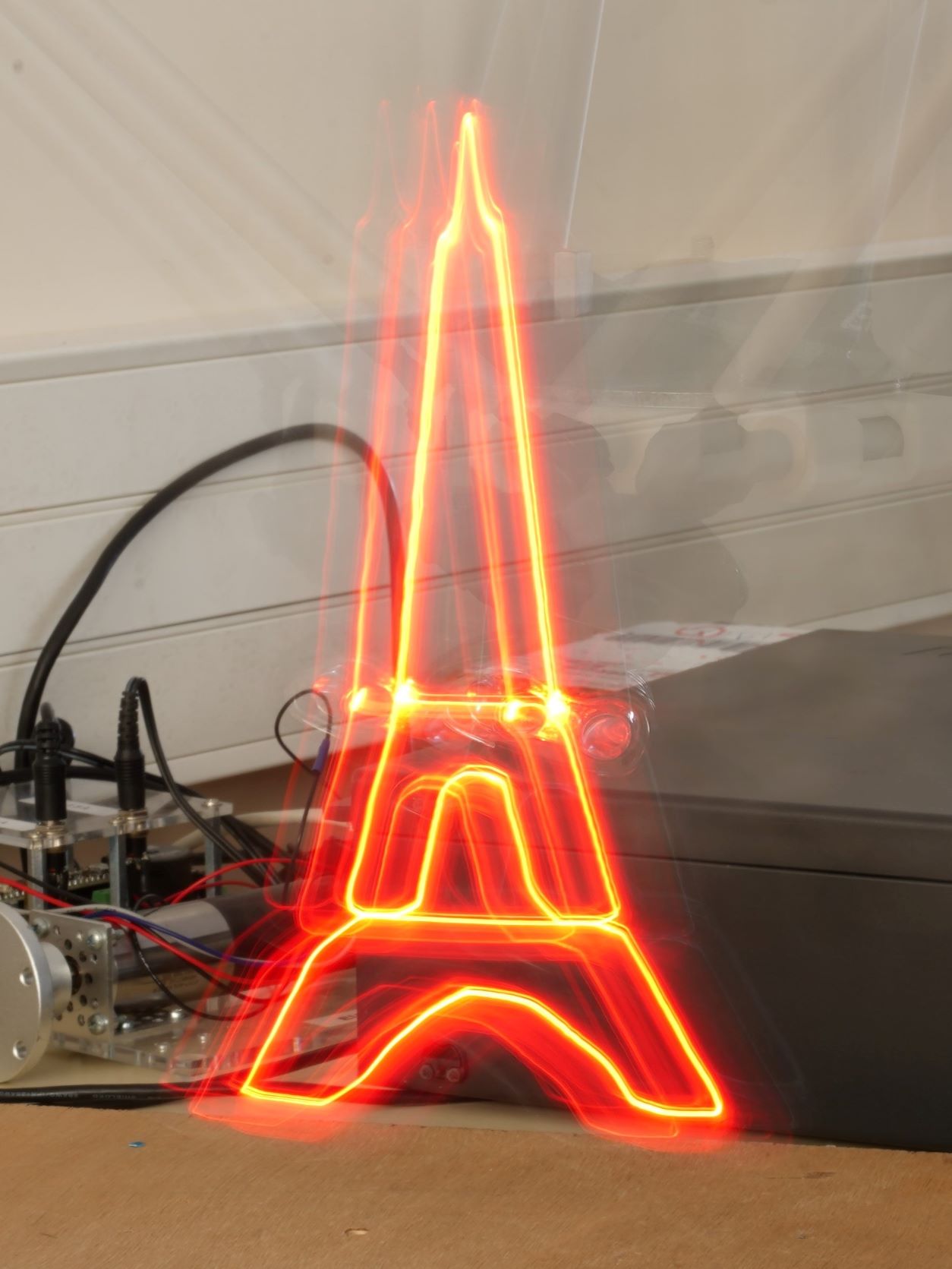
Voici deux autres exemples de trajectoires:
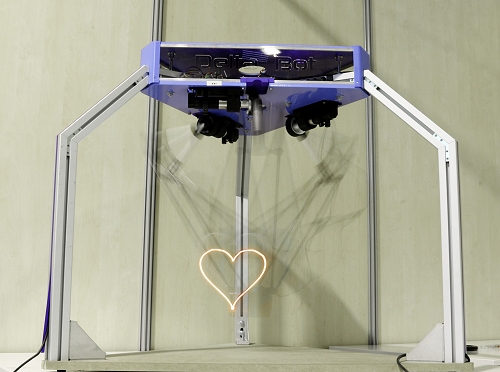
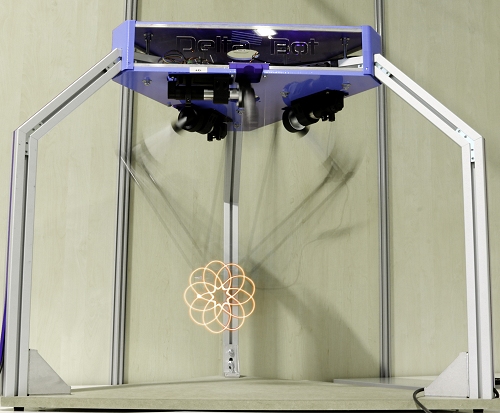
Et voici des productions d'étudiants ayant carte blanche sur le TP ingénierie numérique:


Logiciels, documentation et travaux pratiques
Ce système est livré avec les éléments suivants:
- Documentation complète
- Tous les programmes permettant de faire fonctionner le robot dans ses différents modes
- Tableaux de commande et de visualisation utilisables avec le logiciel MyViz
- Modéle CAO SolidWorks: https://www.3sigma.fr/deltabot/SW/DeltaBot_SW.zip
- Travaux pratiques
Disponibilité
Ce système est disponible dans notre boutique en ligne: https://boutique.3sigma.fr/191-deltabot.html.
Vous pouvez également nous demander un devis et / ou une présentation personnalisée à l'adresse suivante: info@3sigma.fr.
Produit complémentaire: banc moteur seul
Le banc moteur (vendu séparément) permet entre autres d'étudier la commande d'un axe du robot sans aucun risque de détérioration: https://www.3sigma.fr/Systemes_didactiques-Banc_moteur_DeltaBot.html.