Commande de la plateforme de Stewart Deltalab
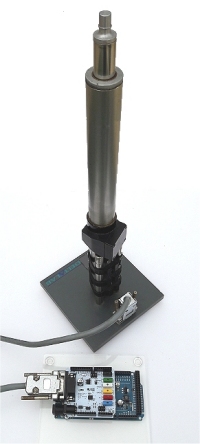
Attention: ce système n'intègre pas la partie mécanique "plateforme de Stewart" présentée sur la photo ci-dessus. Il ne concerne que la partie "électronique de commande" (non visible sur cette photo car intégrée dans le socle) et les logiciels applicatifs associés.
Le système de commande original de la plateforme de Stewart Deltalab nécessitant un matériel obsolète (PC sous Windows XP ou antérieur avec carte mère à bus ISA ou PCI), il nous a semblé intéressant de développer un nouveau système de commande plus moderne, plus standard et plus pérenne, car déporté dans le socle et connecté à l'ordinateur hôte via un simple câble Ethernet.
Ce système intègre également une nouvelle centrale inertielle (fixée sur le plateau mobile le jour de l'installation) utilisant un composant de type MEMS permettant de mesurer les angles d'Euler et les vitesses angulaires.
Tout ceci permet de continuer à utiliser cette plateforme avec du matériel plus actuel et une nouvelle interface logicielle apportant les fonctionnalités décrites ci-après.
Pilotage du système réel ou simulé
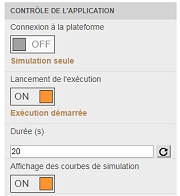
Le logiciel de pilotage intègre un modèle de simulation paramétrable de la plateforme. Il est ainsi possible de l'utiliser dans les 3 cas de figure suivants :
- En mode « simulation seule » : les élèves peuvent mettre au point les formules de pilotage, étudier l'influence des différents paramètres du modèle,...
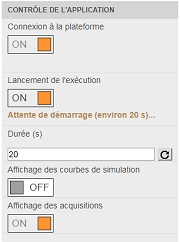
- En mode « pilotage de la plateforme seule » : les élèves pilotent le système en mode direct (consignes de position sur les vérins) ou inverse (consignes de position cartésienne et d'attitude angulaire), interactivement (via l'utilisation de curseurs) ou grâce à des formules mathématiques
- Dans ces deux modes simultanément : ceci permet de comparer les acquisitions réalisées sur le système réel aux résultats de simulation de la plateforme. Ceci en temps-réel (pendant le fonctionnement du système) ou en temps différé (en utilisant les fenêtres de tracé et / ou les sauvegardes de données acquises et simulées
 |
 |
 |
| Mode "Simulation seule" | Mode "Pilotage de la plateforme seule" | Mode simultané |
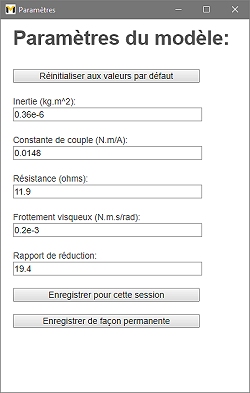
Modification des paramètres du modèle
Comparaison des mesures sur le système réel avec les résultats de simulation
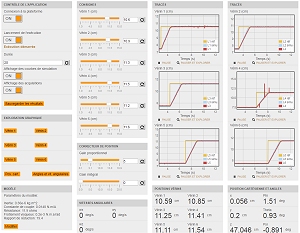
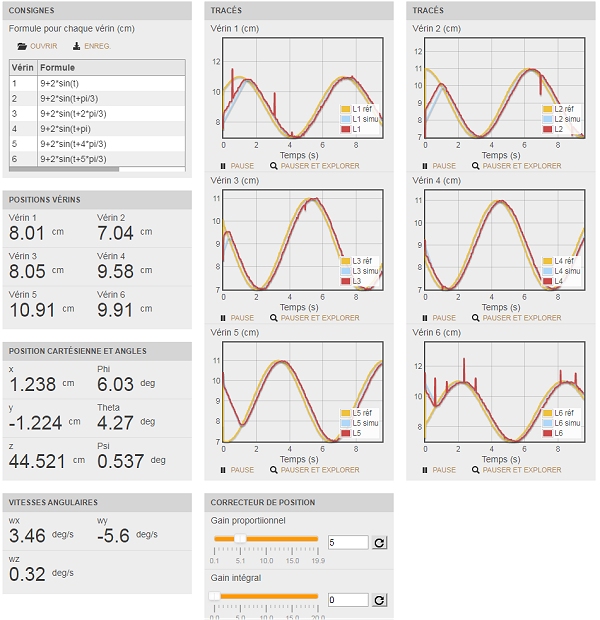
Dans le mode « simultané » (exécution du modèle de simulation en parallèle du pilotage de la plateforme réelle), les fenêtres de tracé affichent les résultats des acquisitions et de la simulation sur des courbes superposées:
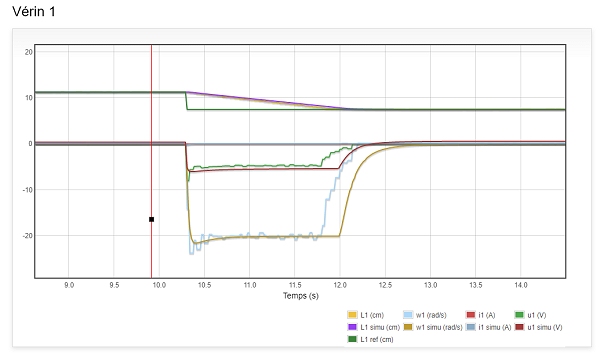
Un clic sur la légende de chaque courbe permet d'activer ou non son affichage :

Affichage de la position et de la vitesse activé
Affichage du courant et de la tension de commande désactivé
Les mesures acquises sur le système réel et les données simulées sont les suivantes :
- Position linéaire de chaque vérin
- Vitesse angulaire de chaque moteur de vérin
- Courant dans chaque moteur de vérin
- Tension de commande de chaque moteur de vérin
- Angles d'Euler
- Vitesses angulaires
Asservissement en position des vérins via 3 boucles imbriquées position / vitesse / courant
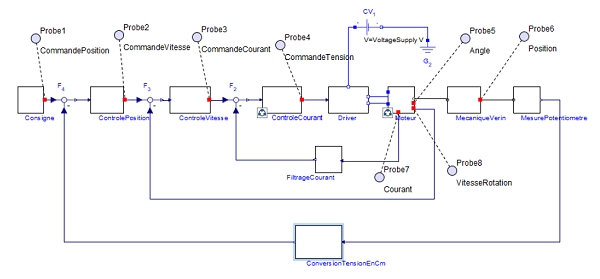
On mesure sur chaque vérin la position (grâce au potentiomètre), la vitesse du moteur (via la génératrice tachymétrique) et le courant (par l'intermédiaire d'un capteur intégré au nouveau système de commande). Ceci permet de réaliser un triple asservissement position / vitesse / courant. Le correcteur de position est réglage pendant le fonctionnement du système. Des études d'asservissement plus approfondies sont faisables sur le système « Vérin seul », pour lequel nous avons également développé un nouveau système de commande.
Le synoptique de l'asservissement en position de chaque vérin est le suivant:
Centrale inertielle 9 axes

Une nouvelle centrale inertielle 9 axes est incluse dans cette mise à jour matérielle. Elle est basée sur un composant de type MEMS intégrant un accéléromètre, un gyromètre et un magnétomètre, réalisant chacun des mesures sur les 3 axes. Les quantités finalement disponibles sur le système sont les angles d'Euler (calculés par le composant lui-même) et les vitesses de rotation.
Pilotage en mode direct (asservissement de position des 6 vérins) ou inverse (asservissement de la position et de l'orientation de la plateforme)
Il est bien sûr possible de piloter le système en mode direct. Dans ce cas, on donne une consigne de position sur chaque vérin. Le modèle direct intégré au logiciel permet alors de visualiser les positions cartésiennes et les vitesses angulaires résultantes.
Le logiciel de pilotage intégrant également un modèle inverse de la plateforme, il est aussi possible de piloter cette dernière en donnant des consignes de position cartésienne et d'attitude angulaire.
Pilotage interactif (modification des positions et/ou orientations par curseur) ou via l'utilisation de formules mathématiques
Les consignes peuvent être données de deux façons différentes : interactivement (via des curseurs) ou en utilisant des formules mathématiques.
Le mode interactif est utile pour réaliser des déplacements « unitaires » et analyser la réponse à un échelon de consigne de chaque vérin ou de la plateforme sur chaque axe cartésien de position ou d'angle.
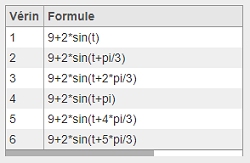
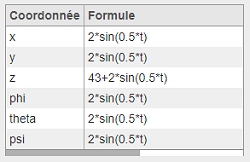
Le mode « formules » est plus adapté pour réaliser un pilotage global du système, en mode direct (formules sur chaque vérin) ou inverse (formules sur les positions cartésiennes et sur les angles d'Euler).
Dans les deux cas, les mouvements de la plateforme sont très fluides. En effet, contrairement au système original, le nouveau logiciel de commande ne pilote pas la plateforme via une série de points, mais de façon continue, pour une durée comprise entre 0 et 1000 s (interruptible à tout moment en appuyant sur le bouton « Stop »).
 |
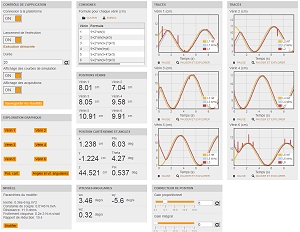 |
| Pilotage en mode direct avec curseurs | Pilotage en mode direct avec formules |
 |
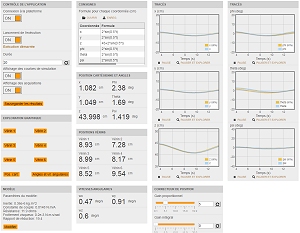 |
| Pilotage en mode inverse avec curseurs | Pilotage en mode inverse avec formules |
Acquisition et affichage des données en temps-réel
Toutes les données acquises sur le système réel et les résultats de simulation sont disponibles en temps différé, sous forme de courbes ou de sauvegarde (fichier CSV).
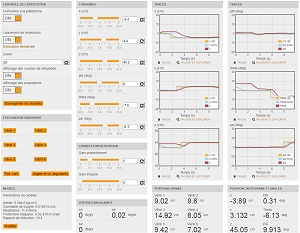
En outre, on affiche en temps-réel, pendant le pilotage de la plateforme, les quantités suivantes :
- Position de chaque vérin, réelle et simulée (sous forme de courbes, en mode de pilotage « direct »)
- Positions cartésiennes et angles d'Euler (sous forme de courbes, en mode de pilotage « inverse »)
- Position réelle ou simulée de chaque vérin (sous forme textuelle, dans tous les modes)
- Position cartésienne et angles d'Euler réels ou simulés (sous forme textuelle, dans tous les modes)
- Vitesses angulaires réelles (sous forme textuelle, dans tous les modes)
Affichage en temps-réel de certaines données mesurées
Pilotage par programme via une API en langage Python
Une fonction Python est disponible pour piloter la position de chaque vérin de la plateforme dans ce langage. Cette fonctionnalité permet par exemple de faire programmer aux élèves le modèle inverse (plus facile sur ce système mécanique particulier que le modèle direct) en Python.
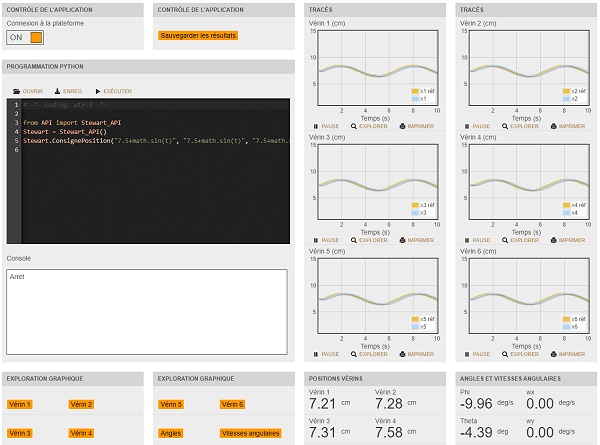
Programmation Python au sein du tableau de bord
avec affichage des données mesurées en parallèle
Vidéo
La vidéo ci-dessous présente un exemple de pilotage réalisé dans les conditions suivantes:
- Pilotage du système réel
- Mode direct
- Pilotage via des formules mathématiques, pour une durée indéfinie
- Acquisition et affichages des données en temps-réel
Disponibilité
Ce système est disponible dans notre boutique en ligne: https://boutique.3sigma.fr/robots/192-commande-de-la-plateforme-de-stewart-deltalab.html
Vous pouvez également nous demander un devis à l'adresse suivante: info@3sigma.fr.
Le tarif standard inclus:
- La mise à jour matérielle, d'une durée d'environ une heure, réalisée dans votre établissement (en France métropolitaine) par une personne de 3Sigma
- Une formation d'une à deux heures sur les nouveaux logiciels applicatifs
Si votre établissement n'est pas situé en France métropolitaine et/ou si vous souhaitez réaliser la mise à niveau vous-même, merci de nous contacter (voir nos coordonnées en haut à droite de cette page).
Matériel
Ce nouveau système de commande s'insère dans le socle de la plateforme.
L'architecture matérielle est la suivante:
- 3 cartes Arduino Due associées à un "shield" de commande bi-moteur pilotent chacune 2 vérins (asservissement de position avec boucle de vitesse et de courant)
- un mini-ordinateur embarqué gère la synchronisation entre les cartes Arduino et l'interface avec le PC hôte
- une centrale inertielle 9 axes (connectée au mini-ordinateur) mesure l'orientation, les vitesses de rotation et les accélérations de la plateforme
Une fois installé, ce système de commande est directement exploitable et ne nécessite pas de programmation de votre part. Néanmoins, si vous le désirez, c'est faisable (voir ci-dessous).
Logiciels et documentation
Ce système de commande est livré avec les éléments suivants:
- Documentation complète
- Code source des programmes Arduino et des scripts Python embarqués sur le mini-ordinateur
- Tableaux de commande et de visualisation utilisables avec le logiciel MyViz
- API Python permettant de piloter la plateforme par programme
- Modèle MapleSim (coût additionnel, en option)
Notez par ailleurs que vous disposez d'un accès total au mini-ordinateur embarqué. Vous pouvez ainsi modiier les programmes existants ou en créer d'autres. D'autre part, une application très simple permet de reprogrammer les cartes Arduino si vous souhaitez apporter des modifications aux programmes originaux.
Produit complémentaire: commande d'un vérin électrique
Ce système (vendu séparément) permet d'étudier la commande d'un vérin seul: https://boutique.3sigma.fr/robots/182-commande-du-v%C3%A9rin-%C3%A9lectrique-deltalab.html.