Delta2D

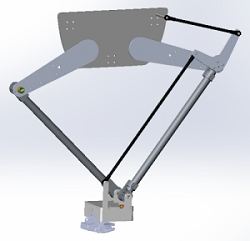
Le Delta2D est un robot parallèle à deux degrés de liberté, fonctionnant dans le plan vertical et permettant de faire de multiples activités couvrant une part importante du programme des CPGE (Classes Préparatoires aux Grandes Ecoles).
Un robot delta 2 axes permet, via l'articulation de deux parallélogrammes, de positionner l'effecteur dans un espace à 2 dimensions avec une orientation constante. Ceci en fait un robot idéal dans le monde industriel pour réaliser, par exemple, des opérations de "Pick and Place" à grande vitesse.
Caractéristiques matérielles
Composants
- Structure en aluminium (660 mm de large sur 500 mm de haut), biellettes en fibre de carbone
- Deux axes motorisés par des servomoteurs numériques asservis en position, vitesse et courant. Cependant, seul l'asservissement de position (correcteur PID avec saturation) est modifiable en temps-réel sans modification de programme
- Deux codeurs absolus situés au niveau des "coudes"
- Pilotage direct par un micro-contrôleur très puissant (carte Teensy 3.6)
- Connexion par Ethernet sur le réseau local de l'établissement, ou bien liaison Ethernet point à point
- Supervision de haut niveau via une carte Odroid (équivalente d'une Rasperry Pi, mais plus robuste)
-
Effecteur intelligent contenant les éléments suivants:
- Deux capteurs de distance laser pour mesurer la position cartésienne absolue (par rapport au socle et au panneau latéral droit)
- Un capteur de couleur
- Une LED blanche pour éclairer les objets à saisir et faciliter la détection de couleur
- Une pince actionnée par servomoteur avec mesure de l'écartement des mâchoires. Un jeu de cube de couleur est fourni afin de réaliser rapidement des expériences de reconnaissance de couleur et de prise d'objets
- Un thermistor de mesure de température
- Gestion par un micro-contrôleur dédié relié au micro-contrôleur principal par liaison série
Motorisation
Le robot est motorisé par deux servomoteurs intelligents Dynamixel XH430-W350-T, intégrant des moteurs à courant continu Maxon. Les servomoteurs sont commandés en vitesse, ce qui signifie que la boucle de position est conçue par nos soins et programmée sur la carte Teensy 3.6.
Le réglage de cet asservissement de position est facilement modifiable depuis les tableaux de bord de pilotage fournis avec le système (voir les vidéos au page de cette page).
Capteurs et télémétrie
Les capteurs présents sur le système permettent une instrumentation très complète. Les signaux suivants sont disponibles en télémétrie:
- Position et vitesse des axes motorisés (les "épaules")
- Vitesses de consigne (sorties des boucles d'asservissement en position)
- Courants et tensions de commande des moteurs
- Position des "coudes"
- Coordonnées cartésiennes de l'effecteur
- Couleur de l'objet à saisir
- Ecartement des mâchoires de la pince
- Température du servomoteur de la pince
Logiciels
Pilotage et programmation du robot
Le Delta2D se pilote et s'analyse facilement grâce aux nombreux tableaux de bord intégrés au logiciel MyViz. Celui-ci permet non seulement d'interagir avec le système grâce à des boutons et des curseurs, mais il embarque également tous les composants nécessaires à une programmation plus avancée:
- Editeur de table de points (permettant en plus de les importer ou exporter au format CSV)
- Editeur Python (avec possibilité d'import / export)
- Editeur G-code (avec possibilité d'import / export)
- Editeur et interpréteur de diagramme d'états, avec visualisation des états et transitions actifs pendant le fonctionnement
Simulation temps-réel
Le Delta2D intègre un modèle de simulation temps-réel très complet permettant de réaliser les mêmes expériences que sur le robot réel, avec les mêmes interfaces graphiques et une visualisation 3D (elle aussi temps-réel) remplaçant la vue du vrai système.
Par ailleurs, les paramètres du modèle (caractéristiques des moteurs, charge transportée) sont facilement modifiables.
Ceci procure les avantages suivants:
- Mise au point des programmes de pilotage avant de les utiliser sur le robot réel
- Mesure très facile des écarts entre la réalité et la simulation dans le même environnement
- Recalage des paramètres du modèle en fonction des écarts mesurés
- Extension possible des bornes de variation des gains des correcteurs afin d'amener le système en limite de stabilité (voire de les dépasser), ce qui n'est pas possible sur un système réel
- Etude de la dégradation de performance des asservissements sur des cas impossibles à tester dans la réalité (augmentation ou diminution des frottements par exemple)
- Réalisation de TPs orientés "dimensionnement" permettant aux élèves de choisir parmi 3 types de moteurs celui dont les performances sont les mieux adaptées vis-à-vis d'un cahier des charges donné
- L'utilisation de la même interface pour le système réel et le système simulé permet de reproduire des expériences de mise en service virtuelle, qui est un des éléments phares de l'Industrie 4.0
- Réalisation de TPs virtuels lorsqu'il n'est pas possible d'avoir un matériel sous la main
Ressources
Ce robot est conçu et fabriqué par 3Sigma. Il est donc totalement ouvert et les ressources suivantes sont fournies:
- Un modèle CAO (SolidWorks) permettant aux élèves d'étudier en détail les différents composants et leurs liaisons mécaniques
- Un modèle schéma-bloc pour l'étude de l'asservissement d'un axe, conçu sous Scilab / XCos
- Programme de type "Arduino" de la carte Teensy 3.6
- Programmes Python utilisés par la carte Odroid C1+
- Documents de référence des différents composants
- Exemples de programmes de pilotage en Python, G-code ou diagrammes d'états, directement utilisables
- Documentation complète
- Tableaux de commande et de visualisation utilisables avec le logiciel MyViz, directement intégrés dans ce dernier
Activités pédagogiques
Le Delta2D présente un grand intérêt pédagogique, tant du point de vue de son architecture mécanique que de sa commande et des asservissements associés. Il permet de réaliser les activités suivantes:
- Etudes mécaniques grâce au modèle CAO fourni
- Etude d'un servomoteur numérique intelligent
- Etudes cinématiques à partir des équations (intégrées dans la documentation) de la cinématique directe et inverse
- Asservissements: le correcteur PID avec saturation contrôlant la position est réglable très facilement au travers de l'interface de pilotage
- Etudes statiques et dynamiques sur le courant dans les moteurs en fonction de la charge portée par ces derniers
- Etudes thermiques sur le servomoteur de la pince
- Pilotage interactif via un générateur de signal afin de tester différentes réglages des asservissements
- Pilotage par table de points (en mode cartésien)
- Pilotage par formule mathématique (en mode articulaire ou cartésien)
- Pilotage par programme Python via une bibliothèque de fonctions de haut niveau
- Pilotage par programme G-code
- Pilotage par diagramme d'état grâce à un outil intégré permettant de réaliser facilement des machines à états finis
Noter enfin que le robot est utilisable en ilot car il peut se connecter sur le réseau de l'établissement et être piloté par n'importe quel ordinateur.
Vidéos et captures d'écran
Modèle CAO
Description géométrique et équations
La description géométrique est incluse dans la documentation:
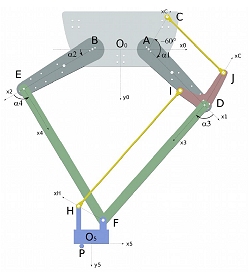
Elle sert de support à l'écriture des équations cinématiques (directe et inverse), elles-mêmes fournies:
 |
 |
Exemple de tableau de bord de pilotage avec MyViz
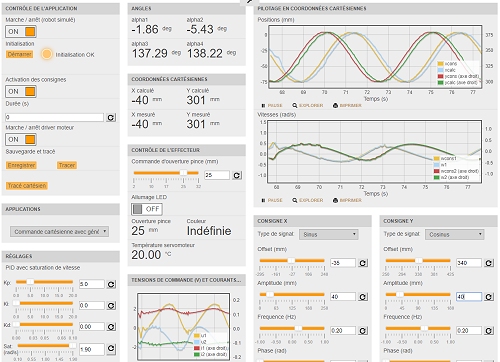
Réglage des asservissements
Le robot est soumis à une série d'échelons de consigne, pendant laquelle il est facile de modifier le réglage des asservissements en interagissant avec des curseurs dans une zone dédiée (en bas à gauche du tableau de bord conçu à cet effet dans le logiciel MyViz).
Pilotage par formules en coordonnées cartésiennes
Grâce à un tableau de bord MyViz spécifique, le Delta2D peut se piloter facilement par l'intermédiaire de formules mathématiques décrivant la position cartésienne à suivre par l'effecteur en fonction du temps. Le programme interne du robot inclut le modèle cinématique inverse permettant de convertir les consignes cartésiennes en consignes angulaires sur chaque axe. Noter à 23 s la visualisation de la consigne et de la mesure sur un tracé cartésien.
Programmation Python
Le robot peut se programmer facilement en langage Python via un éditeur intégré dans le logiciel MyViz. On voit ici un programme simple qui déplace l'effecteur à un point donné, teste la couleur de l'objet et, s'il est rouge (ce qui est le cas), le positionne à un autre endroit.
Programmation par diagramme d'états
La vidéo ci-dessous présente un tri de cubes de couleur programmé par un diagramme d'états (machine à états finis).
Programmation en langage G-code
Le Delta2D peut se programmer facilement en langage G-code via un éditeur intégré dans le logiciel MyViz. Noter à 8 s la prévisualisation de la trajectoire à effectuer et à 15 s le changement de la vitesse de parcours dans le programme (de 50 à 150 mm/s).
Le langage G-code permet en quelques lignes de programmer des mouvements de suivi de trajectoire rectligne ou en arc de cercle, ce qui est beaucoup plus difficile à réaliser via une table de points ou un programme Python.
Simulation temps-réel
La fourniture logicielle du Delta2D intègre un modèle de simulation temps-réel permettant de réaliser les mêmes activités qu'avec le robot réel. On voit sur cette vidéo le suivi d'une trajectoire programmée en langage G-code.
Comparaison avec un robot delta 3 axes
Notre gamme de systèmes didactiques intègre également un robot delta 3 axes, le DeltaBot. Nous listons ci-dessous les différences principales entre les deux systèmes.
DeltaBot
- Robot très dynamique 3 axes, conçu pour reproduire la rapidité de mouvement des robots industriels
- Effecteur intégrant un actionneur électromagnétique et une Webcam
- Modes de pilotage centrés autour des asservissements, de la programmation par table de points (Pick & Place et suivi de trajectoire) ou par apprentissage (enregistrement et reproduction de mouvements manuels) et du traitement d'image (mode "chirurgical" avec positionnement par joystick et analyse d'image)
Delta2D
- Robot 2 axes, plus orienté sur les études cinématiques. Il n'a pas été conçu pour être aussi rapide qu'un robot industriel
- Effecteur intégrant un pince ainsi que des capteurs de distance et de couleur
- Modes de pilotage centrés autour des asservissements, de la programmation par formules, tables de points, langage Python, G-code et diagrammes d'états
Disponibilité
Ce système est disponible dans notre boutique en ligne:
https://boutique.3sigma.fr/robots/194-delta2d.html
Vous pouvez également nous demander un devis et / ou une présentation personnalisée à l'adresse suivante: info@3sigma.fr.