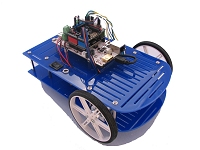
X-Bot
Vous trouverez ci-dessous les téléchargements du robot X-Bot (https://boutique.3sigma.fr/12-robots)
Liens directs vers les versions suivantes:
Version Romeo
Documentations:
-
Mobilos:
Mobilos_longue_3.2.pdf
Librairies additionnelles:
Ces librairies sont nécessaires pour pouvoir compiler les programmes Arduino (voir plus loin). Elles doivent être décompressées dans le sous-répertoire "libraries" de votre installation Arduino.
-
FlexiTimer2:
FlexiTimer2.zip -
digitalWriteFast:
digitalWriteFast.zip -
QTRSensors:
QTRSensors.zip
Programmes Arduino:
Ces programmes sont abondamment commentés pour vous permettre de bien les comprendre.
-
Asservissement de mouvement:
MobilosStandard_2.2.zip -
Suivi de ligne:
MobilosSuiviLigne_2.2.zip
Applications spécifiques de pilotage des moteurs électriques:
-
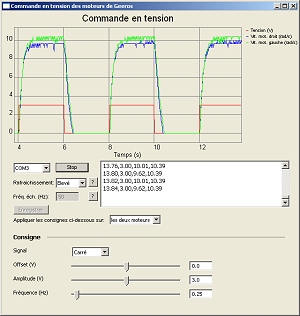
Programme Arduino pour la commande en tension des moteurs:
GeerosArduinoCommandeMoteursEnTension_3.0.zip -
Interface de pilotage depuis votre ordinateur:
GeerosInterfaceCommandeMoteursEnTension_2.9.zip
-
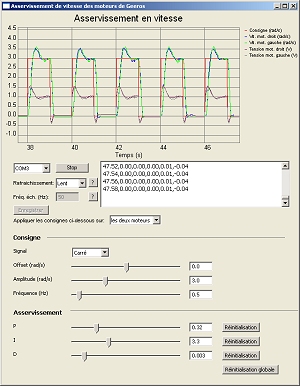
Programme Arduino pour l'asservissement de vitesse des moteurs:
GeerosArduinoAsservissementMoteursEnVitesse_3.0.zip -
Interface de pilotage depuis votre ordinateur:
GeerosInterfaceAsservissementMoteursEnVitesse_2.9.zip
Versions pcDuino et Raspberry Python
Documentations:
-
X-Bot pcDuino :
X-Bot-pcDuino_longue.pdf -
X-Bot Raspberry Python:
X-Bot-RaspberryPython_longue.pdf
Programmes Python
Attention: ces programmes doivent être utilisés en cas de secours uniquement ! Ils sont déjà installés sur les robots livrés.
Cependant, si votre robot est assez ancien, de nouvelles versions peuvent être disponibles. Elles sont accessibles ici:
-
X-Bot pcDuino:
https://github.com/3sigma/X-Bot-pcDuino/tree/master/programmes_python -
X-Bot Raspberry Python:
https://github.com/3sigma/X-Bot-RaspberryPython/tree/master/programmes_python
Les fichiers doivent être placés dans le répertoire /root/programmes_python du robot.
Applications spécifiques de pilotage des moteurs électriques :
-
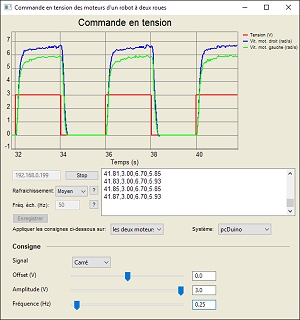
Interface de pilotage de la tension des deux moteurs depuis votre ordinateur:
InterfaceReseauCommandeDeuxMoteursEnTension_3.0.zip
-
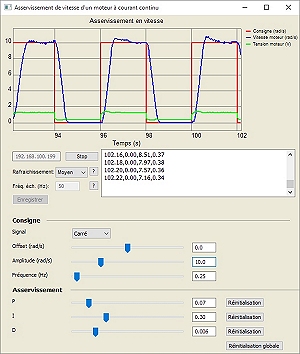
Interface de pilotage de l'asservissement en vitesse des deux moteurs depuis votre ordinateur:
InterfaceReseauAsservissementDeuxMoteursEnVitesse_3.0.zip
Programmes Arduino de la carte A-Star (version Raspberry Pi uniquement):
La carte A-Star est une carte compatible Arduino, connectée via un bus i2c à la Raspberry Pi.
-
Firmware de communication avec la carte Raspberry Pi
FirmwareAStarXBot_1.0.zip -
Commande des moteurs en tension (fonctionnement autonome sans Raspberry Pi)
XBotAStarCommandeMoteursEnTension_1.0.zip -
Asservissement des moteurs en vitesse (fonctionnement autonome sans Raspberry Pi)
XBotAStarAsservissementMoteursEnVitesse_1.0.zip
Toutes versions
Eléments de circuit de suivi de ligne
Les deux éléments de base contenus dans le fichier ci-dessous doivent vous permettre de réaliser (par collage et découpage) des circuits très variés: