Commande de moteurs CC accouplés
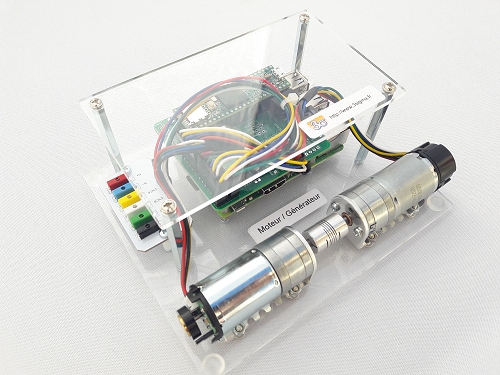
Ce système est composé de deux motoréducteurs, l'un fonctionnant en moteur et l'autre en générateur de couple externe (moteur ou résistant).
Il permet de faire les mêmes expériences d'identification et d'asservissement qu'avec un moteur seul, tout en allant plus loin grâce au générateur, capable de créer une charge quelconque.
Par ailleurs, il est possible d'utiliser deux modes de pilotage pour cet ensemble:
- L'un via une carte mcro-contrôleur très puissante (Teensy 4.1, compatible Arduino) pour réaliser des expériences nécessitant une cadence d'acquisition élevée
- L'autre via une carte Raspberry Pi (ou Odroid C4), exploitée notamment pour l'écriture du correcteur numérique en Python et pour la simulation de charges complexes
Ces deux modes coexistent sans qu'aucune modification matérielle ne soit nécessaire car les deux cartes sont connectées l'une à l'autre.
Caractéristiques matérielles
Composants
- Deux moteurs à courant continus accouplés. Ces moteurs sont notamment utilisés sur notre système Slider Cam / Pont Roulant
- Pilotage en mode acquisition rapide par une carte micro-contrôleur Teensy 4.1
- Pilotage via programmation Python grâce à une carte Raspberry Pi ou Odroid C4 (en fonction des disponibilités)
- Connexion USB avec l'ordinateur d'exploitation
Capteurs et télémétrie
Les capteurs présents sur le système permettent une instrumentation très complète. Les signaux suivants sont disponibles en télémétrie pour le moteur et le générateur:
- Position et vitesse issues du codeur incrémental
- Courant et tension de commande
- Estimation du couple
Logiciels
Ce système se pilote et s'analyse facilement grâce aux nombreux tableaux de bord intégrés au logiciel MyViz. Celui-ci permet non seulement d'afficher les données de télémétrie mais aussi d'interagir avec le système grâce à des boutons et des curseurs afin, par exemple, de régler les asservissements en temps-réel.
Ressources
Ce système est conçu est fabriqué par 3Sigma. Il est donc totalement ouvert et les ressources suivantes sont fournies:
- Documentation complète
- Tableaux de commande et de visualisation utilisables avec le logiciel MyViz, directement intégrés dans ce dernier
- Programme Python de correcteur numérique (à reproduire par les élèves)
- Différents types de générateur de couple externe
Activités pédagogiques
Ce système permet de couvrir de nombreux points du programme, en particulier la programmation Python d'un correcteur numérique permettant d'asservir un moteur.
Il permet de réaliser les activités suivantes:
- Identification des paramètres électriques et mécaniques à partir d'une commande en boucle ouverte avec acquisitions rapides
- Asservissement de vitesse ou de position avec ou sans couple externe
- Programmation Python du correcteur numérique de vitesse ou de position
- Etude de la modification de la cadence d'échantillonnage du correcteur numérique
David Fournier (du Lycée Loritz de Nancy) propose par ailleurs le TP suivant:
Captures d'écran
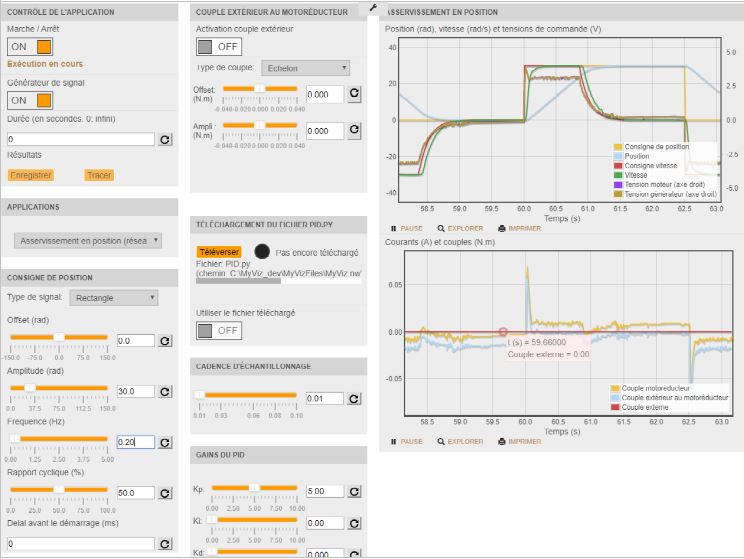
Exemple de tableau de bord de pilotage avec MyViz (asservissement de position avec possibilité de modifier le programme Python du correcteur numérique et d'étudier l'influence de la cadence d'échantillonnage):
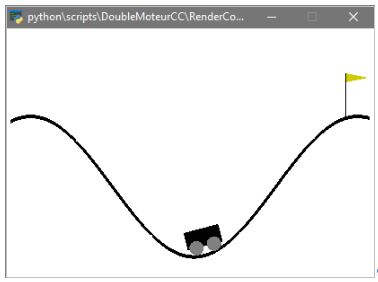
Générateur de couple externe (avec visualisation) de type "Mountain car":
Asservissement de vitesse avec cadence d'échantillonnage optimale:
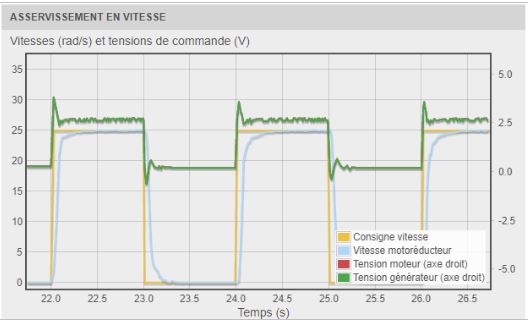
Des oscillations apparaissent si on diminue trop la cadence d'échantillonnage:

Disponibilité
Ce système est disponible dans notre boutique en ligne:
https://boutique.3sigma.fr/robots/196-commande-de-moteurs-cc-accouples.html
Vous pouvez également nous demander un devis et / ou une présentation personnalisée à l'adresse suivante: info@3sigma.fr.