IArm
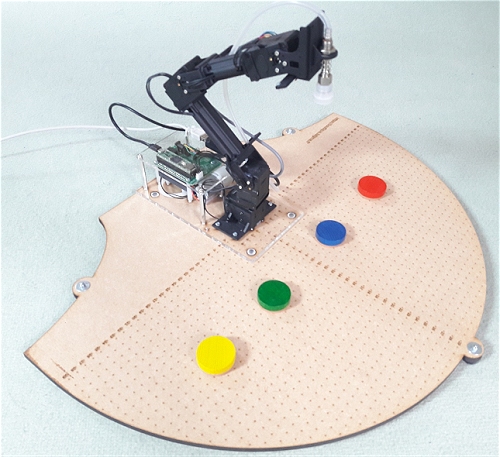
IArm est un bras manipulateur à 4 degrés de liberté, permettant de faire de multiples activités couvrant une part importante du programme des CPGE (Classes Préparatoires aux Grandes Ecoles), notamment sur la partie "Intelligence artificielle".
Caractéristiques matérielles
Composants
- Structure en plastique à 4 degrés de liberté
- 4 axes motorisés par des servomoteurs numériques asservis en position et vitesse
- Pilotage direct par un micro-contrôleur très puissant (carte Teensy 4.1)
- Effecteur intégrant une webcam et un préhenseur pneumatique
- Connexion via liaison USB avec l'ordinateur de pilotage
Motorisation
Le robot est motorisé par quatre servomoteurs intelligents Dynamixel XL430-W250-T. Les servomoteurs sont commandés en vitesse, ce qui signifie que la boucle de position est conçue par nos soins et programmée sur la carte Teensy 4.1.
Le réglage de cet asservissement de position est facilement modifiable depuis les tableaux de bord de pilotage fournis avec le système.
Capteurs et télémétrie
Les capteurs présents sur le système permettent une instrumentation très complète. Les signaux suivants sont disponibles en télémétrie:
- Position et vitesse des axes motorisés
- Vitesses de consigne (sorties des boucles d'asservissement en position)
- Charges et tensions de commande des moteurs
Logiciels
Pilotage et programmation du robot
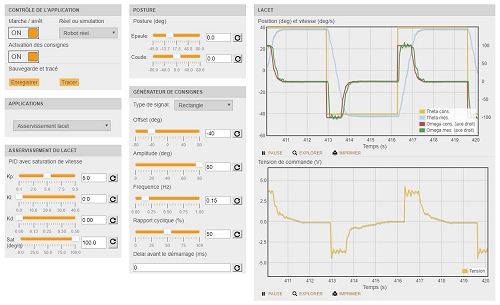
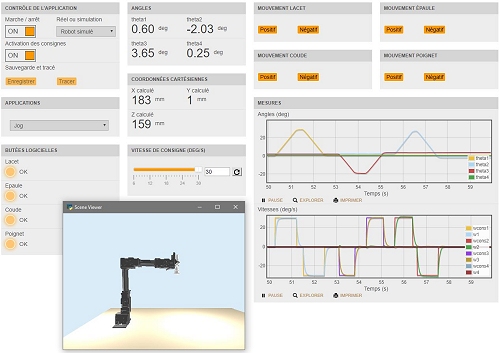
IArm se pilote et s'analyse facilement grâce aux nombreux tableaux de bord intégrés au logiciel MyViz. Celui-ci permet non seulement d'interagir avec le système grâce à des boutons et des curseurs, mais il embarque également tous les composants nécessaires à une programmation plus avancée.
Jumeau numérique
IArm intègre un jumeau numérique (simulateur temps-réel) très complet permettant de réaliser les mêmes expériences que sur le robot réel, avec les mêmes interfaces graphiques et une visualisation 3D (elle aussi temps-réel) remplaçant la vue du vrai système.
Ressources
Ce robot est conçu et fabriqué par 3Sigma. Il est donc totalement ouvert et les ressources suivantes sont fournies:
- Un modèle CAO (SolidWorks) permettant aux élèves d'étudier en détail les différents composants et leurs liaisons mécaniques
- Un modèle schéma-bloc pour l'étude de l'asservissement d'un axe, conçu sous Scilab / XCos
- Programme de type "Arduino" de la carte Teensy 4.1
- Documents de référence des différents composants
- Programmes Python pour le pilotage et les activités en intelligence artificielle
- Documentation complète
- Tableaux de commande et de visualisation utilisables avec le logiciel MyViz, directement intégrés dans ce dernier
Activités pédagogiques
IArm présente un grand intérêt pédagogique, tant du point de vue de son architecture mécanique que de sa commande et des asservissements associés. Il permet de réaliser les activités suivantes:
- Etudes mécaniques grâce au modèle CAO fourni
- Etude d'un servomoteur numérique intelligent
- Etudes cinématiques à partir des équations (intégrées dans la documentation) de la cinématique directe et inverse
- Asservissement de l'axe de lacet: le correcteur PID avec saturation contrôlant la position est réglable très facilement au travers de l'interface de pilotage
- Etudes statiques et dynamiques sur la charge des moteurs en fonction de la posture du bras
- Pilotage interactif via un générateur de signal afin de tester différentes réglages des asservissements
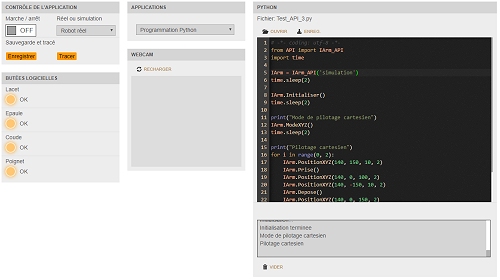
- Pilotage par programme Python via une bibliothèque de fonctions de haut niveau
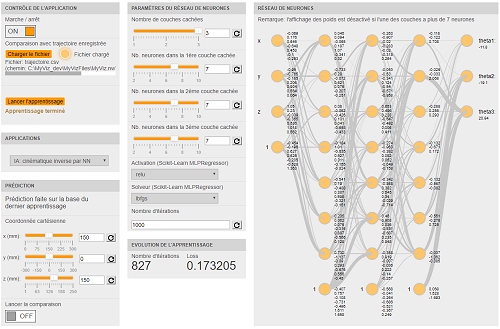
- Régression du modèle inverse par différentes méthodes d'intelligence artificielle (réseaux de neurones, K plus proches voisins, ...)
- Mise en oeuvre d'une suite complète acquisition - apprentissage - prédiction pour faire de la reconnaissance de couleur par réseau de neurones en utilisant la webcam intégrée au système
Vidéos et captures d'écran
Modèle CAO
Description géométrique et équations
La description géométrique est incluse dans la documentation:
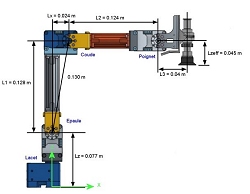
Elle sert de support à l'écriture des équations cinématiques (directe et inverse), elles-mêmes fournies:
 |
 |
Exemple de tableau de bord de pilotage avec MyViz
Intelligence artificielle: reconnaissance de couleur par réseau de neurones
Intelligence artificielle: régression du modèle inverse
Programmation Python
Le robot peut se programmer facilement en langage Python via un éditeur intégré dans le logiciel MyViz.
Jumeau numérique
Disponibilité
Ce système est disponible dans notre boutique en ligne:
https://boutique.3sigma.fr/robots/197-iarm.html
Vous pouvez également nous demander un devis et / ou une présentation personnalisée à l'adresse suivante: info@3sigma.fr.