X-Pince
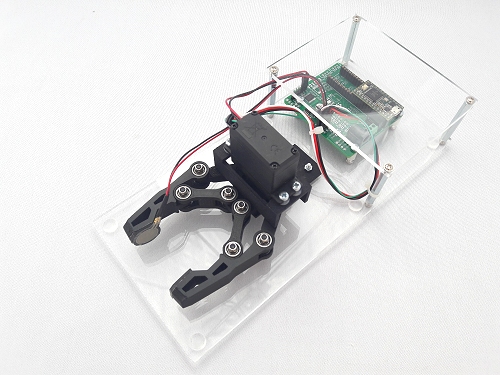
Le système X-Pince permet de faire des expériences de statique, d'asservissement et d'intelligence artificielle sur une pince de robot de type "parallèlogramme". La géométrie de cette dernière autorise par ailleurs des calculs de cinématique très intéressants.
Caractéristiques matérielles
Composants
- Pince de robot Niryo Ned avec motorisation modifiée afin d'augmenter la force de serrage
- Capteur d'effort tactile collé sur une des deux mâchoires de la pince
- Ressorts calibrés amovibles fournis afin de vérifier la corrélation entre l'effort mesuré et l'effort de compression calculé en fonction du déplacement des mâchoires
- Pilotage direct par une carte micro-contrôleur Teensy 3.2
- Connexion USB avec l'ordinateur d'exploitation
Motorisation
La pince est motorisée par un moteur à courant continu avec retour de position analogique (potentiométrique) et mesure de courant. Les asservissements sont facilement modifiables depuis les tableaux de bord de pilotage fournis avec le système.
Capteurs et télémétrie
Les capteurs présents sur le système permettent une instrumentation très complète. Les signaux suivants sont disponibles en télémétrie:
- Ecartement de la mâchoire
- Courant et tension de commande du moteur
- Force de serrage
Logiciels
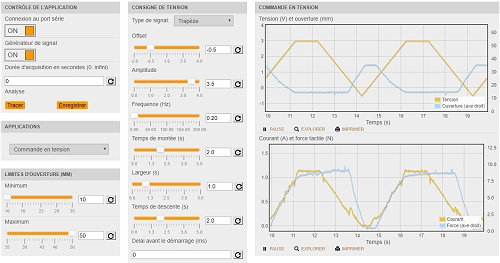
Le système X-Pince se pilote et s'analyse facilement grâce aux nombreux tableaux de bord intégrés au logiciel MyViz. Celui-ci permet non seulement d'afficher les données de télémétrie mais aussi d'interagir avec le système grâce à des boutons et des curseurs afin, par exemple, de régler les asservissements en temps-réel.
Ressources
Ce système est conçu est fabriqué par 3Sigma. Il est donc totalement ouvert et les ressources suivantes sont fournies:
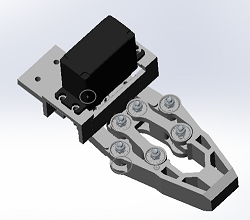
- Un modèle CAO (SolidWorks) permettant aux élèves d'étudier en détail les différents composants et leurs liaisons mécaniques
- Différents modèles schéma-bloc pour l'étude de l'asservissement d'un axe, conçu sous Scilab / XCos
- Documents de référence des différents composants
- Documentation complète
- Tableaux de commande et de visualisation utilisables avec le logiciel MyViz, directement intégrés dans ce dernier
- Travaux pratiques
Travaux pratiques
Le système X-Pince est livré avec des travaux pratiques corrigés, écrits par Robert Papanicola:
- Etude fonctionnelle et structurelle de la pince asservie
- Etude géométrique de la pince asservie
- Identification du servomoteur
- Modélisation de la pince par identification fréquentielle
- Détermination de l'effort de serrage
- Asservissement en effort
- Asservissement en effort par mesure du courant
Notons par ailleurs que les points suivants sont mis œuvre dans ces TPs, ou peuvent l'être dans des activités complémentaires:
- Programmation en Python
- Exploitation d’un jumeau numérique pour tester le système avec des paramètres différents, dans des conditions extrêmes ou pour prendre des objets de caractéristiques personnalisées
-
Intelligence artificielle (réseau de neurones, K plus proches voisins et autres méthodes de régression):
- Apprentissage des modèles géométriques direct et inverse
- Apprentissage de la relation courant / force
Captures d'écran
Modèle CAO
Description géométrique et équations
La description géométrique est incluse dans la documentation:
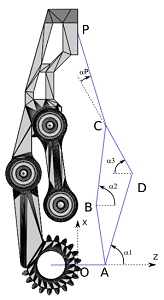
Elle sert de support à l'écriture des équations du système 4 barres, elles-mêmes fournies:

Exemple de tableau de bord de pilotage avec MyViz
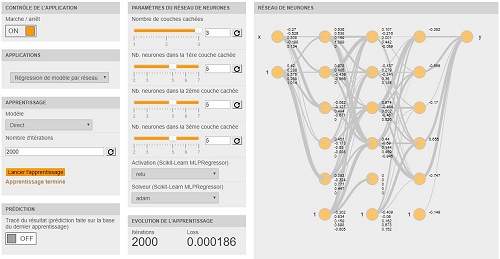
Intelligence artificielle: régression de modèle direct ou inverse par réseau de neurones
Disponibilité
Ce système est disponible dans notre boutique en ligne:
https://boutique.3sigma.fr/robots/195-x-pince.html
Vous pouvez également nous demander un devis et / ou une présentation personnalisée à l'adresse suivante: info@3sigma.fr.