Conception de systèmes didactiques
|
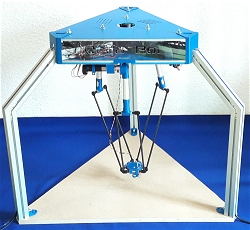
3Sigma conçoit des systèmes didactiques motorisés, principalement dans le domaines de la robotique.
Ouverts et faciles à utiliser grâce au logiciel d'exploitation MyViz, ils permettent de réaliser de nombreuses expériences en asservissement, analyse mécanique, intelligence artificielle,...
|
Développements sur mesure
|
A partir de votre cahier des charges, nous développons sur mesure le système correspondant à vos besoins.
|
Boutique en ligne
|
Notre boutique en ligne propose tous nos produits ainsi que de nombreuses pièces détachées pour vos propres créations.
|