Banc moteur DeltaBot
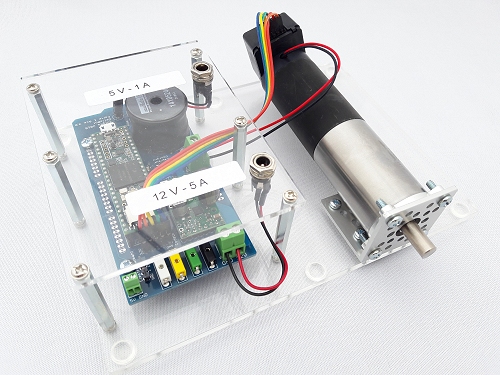
Ce système permet d'étudier la commande d'un axe du robot DeltaBot sans aucun risque de détérioration. De façon plus générale, il permet de réaliser de nombreuses expériences (notamment d'asservissement) sur un moteur à courant continu industriel:
- Moteur Faulhaber serie 3257: 12 V, 5 A, arbre monté sur roulement à billes, constante de temps mécanique de 4.7 ms
- Réducteur 43:1
- Codeur incrémental HEDS 5500 A: 500 lignes par tour de l'arbre moteur, soit 2000 fronts sur les signaux en quadrature, ce qui donne 86000 évènements comptés par tour de l'arbre de sortie du réducteur. Ceci permet une résolution de mesure angulaire de 0.0042 degrés
Electronique de commande
La commande est réalisée par une Teensy 3.6, une des cartes compatibles Arduino les plus puissantes. Elle permet notamment d'exécuter une boucle d'asservissement en courant très rapide et de mesurer la vitesse du moteur grâce à un décodage matériel des signaux issus du codeur incrémental.
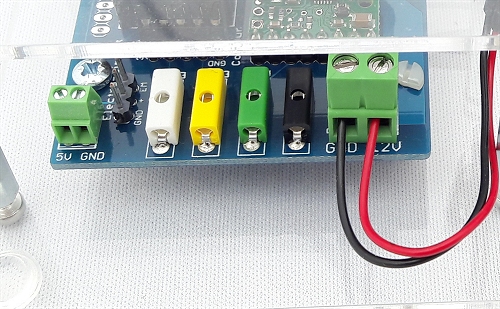
Le système comporte par ailleurs des douilles 2 mm permettant de visualiser les signaux rapides (PWM, voies A et B du codeur) sur votre oscilloscope:
Activités réalisables avec le système
De nombreuses activités sont possibles:
- Modélisation par schéma-bloc
- Commande en tension (boucle ouverte) pour identifier les paramètres du moteur, en temporel et en fréquentiel
- Détermination des non-linéarités et linéarisation autour d'un point de fonctionnement
- Etude de l'influence de l'implantation du capteur de position sur les performances des asservissements
- Etude du système d'anti-saturation de l'intégrateur du régulateur PID
- Asservissement de type PID en courant
- Asservissement de type PID en vitesse avec ou sans boucle de courant
- Asservissement de type PID en position avec ou sans boucles de vitesse et courant
- Pilotage manuel ou semi-automatique via un générateur de signal évolué dans le logiciel MyViz

Logiciels et documentation
Ce système est livré avec les éléments suivants:
- Documentation complète
- Programmes Arduino
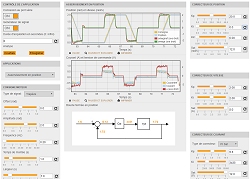
- Tableaux de commande et de visualisation utilisables avec le logiciel MyViz , permettant de modifier les réglages (y compris des asservissements) pendant le fonctionnement du système
- Modèles Scilab / Xcos
Disponibilité
Ce système est disponible dans notre boutique en ligne: https://boutique.3sigma.fr/190-banc-moteur-deltabot.html. Vous pouvez également nous demander un devis à l'adresse suivante: info@3sigma.fr.